Here is my simple and dumb solution.
It is based upon the assumption that the tree will be the most bright and big thing in the picture.
//g++ -Wall -pedantic -ansi -O2 -pipe -s -o christmas_tree christmas_tree.cpp `pkg-config --cflags --libs opencv`
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc,char *argv[])
{
Mat original,tmp,tmp1;
vector <vector<Point> > contours;
Moments m;
Rect boundrect;
Point2f center;
double radius, max_area=0,tmp_area=0;
unsigned int j, k;
int i;
for(i = 1; i < argc; ++i)
{
original = imread(argv[i]);
if(original.empty())
{
cerr << "Error"<<endl;
return -1;
}
GaussianBlur(original, tmp, Size(3, 3), 0, 0, BORDER_DEFAULT);
erode(tmp, tmp, Mat(), Point(-1, -1), 10);
cvtColor(tmp, tmp, CV_BGR2HSV);
inRange(tmp, Scalar(0, 0, 0), Scalar(180, 255, 200), tmp);
dilate(original, tmp1, Mat(), Point(-1, -1), 15);
cvtColor(tmp1, tmp1, CV_BGR2HLS);
inRange(tmp1, Scalar(0, 185, 0), Scalar(180, 255, 255), tmp1);
dilate(tmp1, tmp1, Mat(), Point(-1, -1), 10);
bitwise_and(tmp, tmp1, tmp1);
findContours(tmp1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
max_area = 0;
j = 0;
for(k = 0; k < contours.size(); k++)
{
tmp_area = contourArea(contours[k]);
if(tmp_area > max_area)
{
max_area = tmp_area;
j = k;
}
}
tmp1 = Mat::zeros(original.size(),CV_8U);
approxPolyDP(contours[j], contours[j], 30, true);
drawContours(tmp1, contours, j, Scalar(255,255,255), CV_FILLED);
m = moments(contours[j]);
boundrect = boundingRect(contours[j]);
center = Point2f(m.m10/m.m00, m.m01/m.m00);
radius = (center.y - (boundrect.tl().y))/4.0*3.0;
Rect heightrect(center.x-original.cols/5, boundrect.tl().y, original.cols/5*2, boundrect.size().height);
tmp = Mat::zeros(original.size(), CV_8U);
rectangle(tmp, heightrect, Scalar(255, 255, 255), -1);
circle(tmp, center, radius, Scalar(255, 255, 255), -1);
bitwise_and(tmp, tmp1, tmp1);
findContours(tmp1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
max_area = 0;
j = 0;
for(k = 0; k < contours.size(); k++)
{
tmp_area = contourArea(contours[k]);
if(tmp_area > max_area)
{
max_area = tmp_area;
j = k;
}
}
approxPolyDP(contours[j], contours[j], 30, true);
convexHull(contours[j], contours[j]);
drawContours(original, contours, j, Scalar(0, 0, 255), 3);
namedWindow(argv[i], CV_WINDOW_NORMAL|CV_WINDOW_KEEPRATIO|CV_GUI_EXPANDED);
imshow(argv[i], original);
waitKey(0);
destroyWindow(argv[i]);
}
return 0;
}
The first step is to detect the most bright pixels in the picture, but we have to do a distinction between the tree itself and the snow which reflect its light. Here we try to exclude the snow appling a really simple filter on the color codes:
GaussianBlur(original, tmp, Size(3, 3), 0, 0, BORDER_DEFAULT);
erode(tmp, tmp, Mat(), Point(-1, -1), 10);
cvtColor(tmp, tmp, CV_BGR2HSV);
inRange(tmp, Scalar(0, 0, 0), Scalar(180, 255, 200), tmp);
Then we find every "bright" pixel:
dilate(original, tmp1, Mat(), Point(-1, -1), 15);
cvtColor(tmp1, tmp1, CV_BGR2HLS);
inRange(tmp1, Scalar(0, 185, 0), Scalar(180, 255, 255), tmp1);
dilate(tmp1, tmp1, Mat(), Point(-1, -1), 10);
Finally we join the two results:
bitwise_and(tmp, tmp1, tmp1);
Now we look for the biggest bright object:
findContours(tmp1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
max_area = 0;
j = 0;
for(k = 0; k < contours.size(); k++)
{
tmp_area = contourArea(contours[k]);
if(tmp_area > max_area)
{
max_area = tmp_area;
j = k;
}
}
tmp1 = Mat::zeros(original.size(),CV_8U);
approxPolyDP(contours[j], contours[j], 30, true);
drawContours(tmp1, contours, j, Scalar(255,255,255), CV_FILLED);
Now we have almost done, but there are still some imperfection due to the snow.
To cut them off we'll build a mask using a circle and a rectangle to approximate the shape of a tree to delete unwanted pieces:
m = moments(contours[j]);
boundrect = boundingRect(contours[j]);
center = Point2f(m.m10/m.m00, m.m01/m.m00);
radius = (center.y - (boundrect.tl().y))/4.0*3.0;
Rect heightrect(center.x-original.cols/5, boundrect.tl().y, original.cols/5*2, boundrect.size().height);
tmp = Mat::zeros(original.size(), CV_8U);
rectangle(tmp, heightrect, Scalar(255, 255, 255), -1);
circle(tmp, center, radius, Scalar(255, 255, 255), -1);
bitwise_and(tmp, tmp1, tmp1);
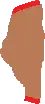
The last step is to find the contour of our tree and draw it on the original picture.
findContours(tmp1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
max_area = 0;
j = 0;
for(k = 0; k < contours.size(); k++)
{
tmp_area = contourArea(contours[k]);
if(tmp_area > max_area)
{
max_area = tmp_area;
j = k;
}
}
approxPolyDP(contours[j], contours[j], 30, true);
convexHull(contours[j], contours[j]);
drawContours(original, contours, j, Scalar(0, 0, 255), 3);
I'm sorry but at the moment I have a bad connection so it is not possible for me to upload pictures. I'll try to do it later.
Merry Christmas.
EDIT:
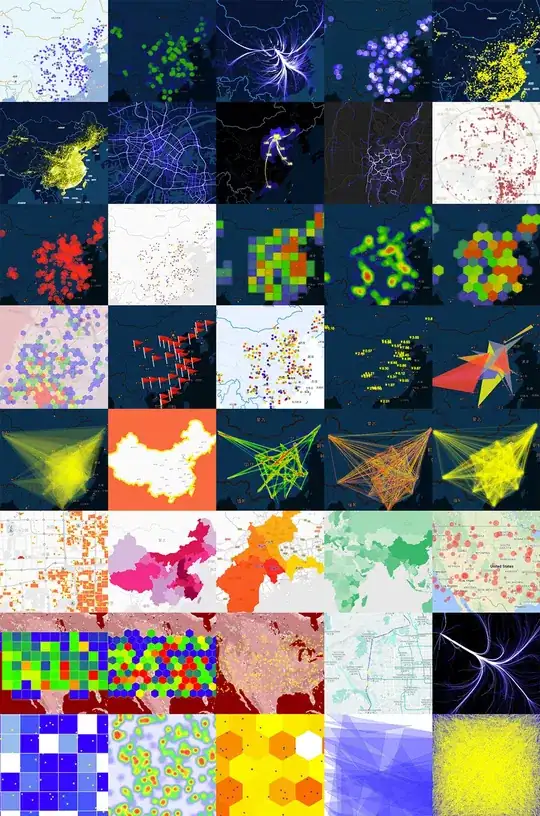
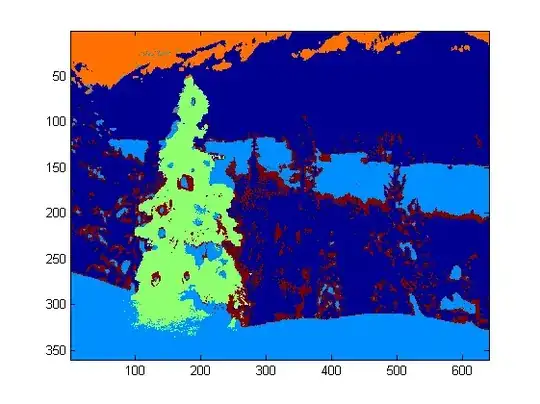
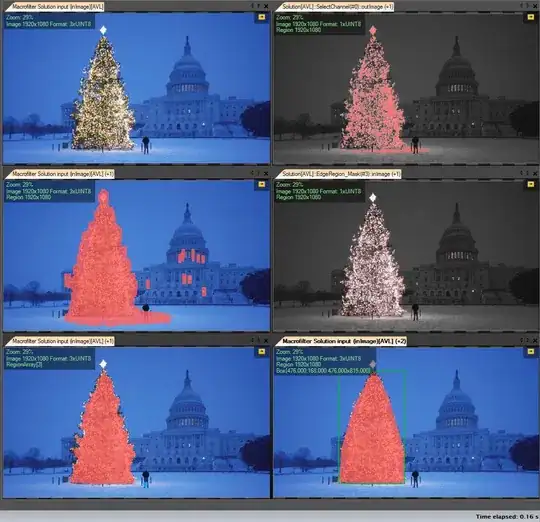
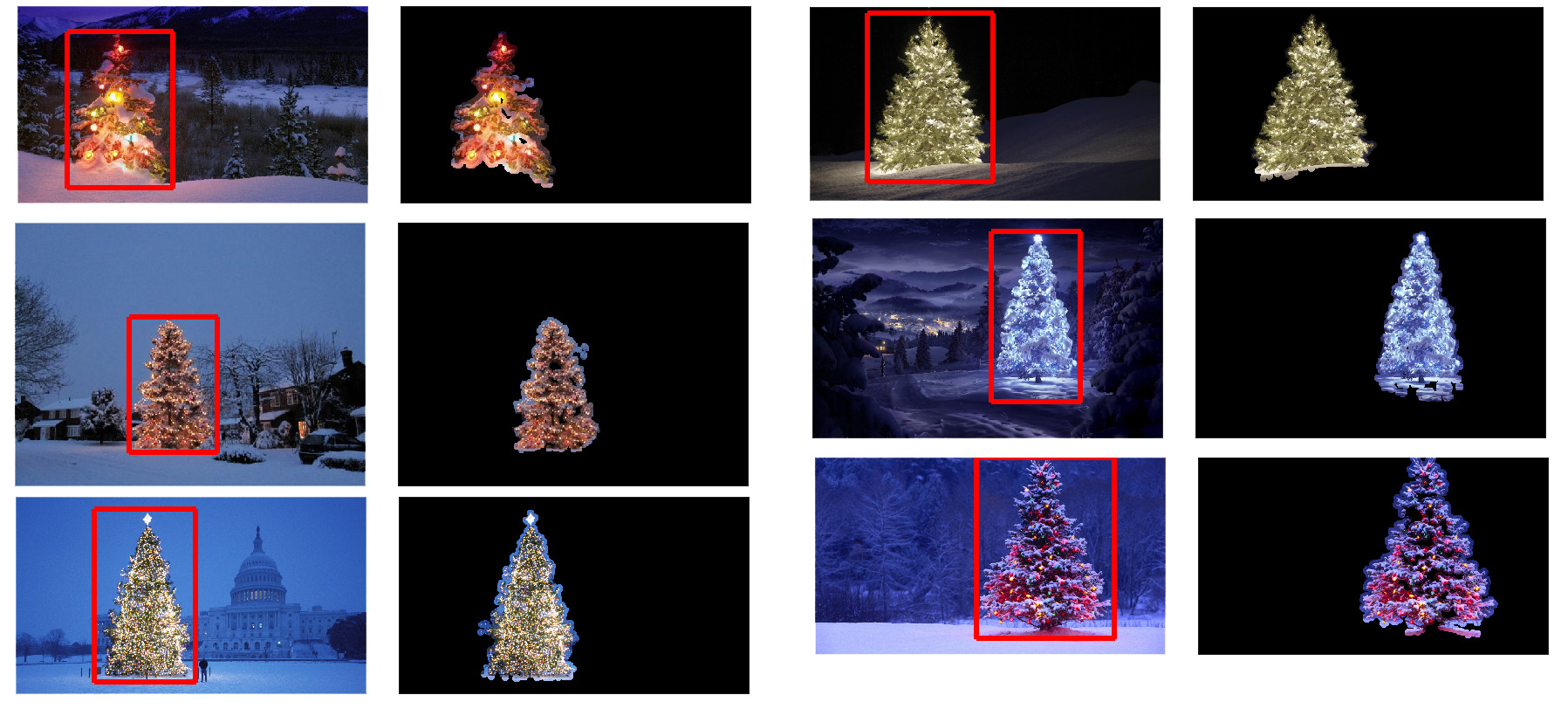
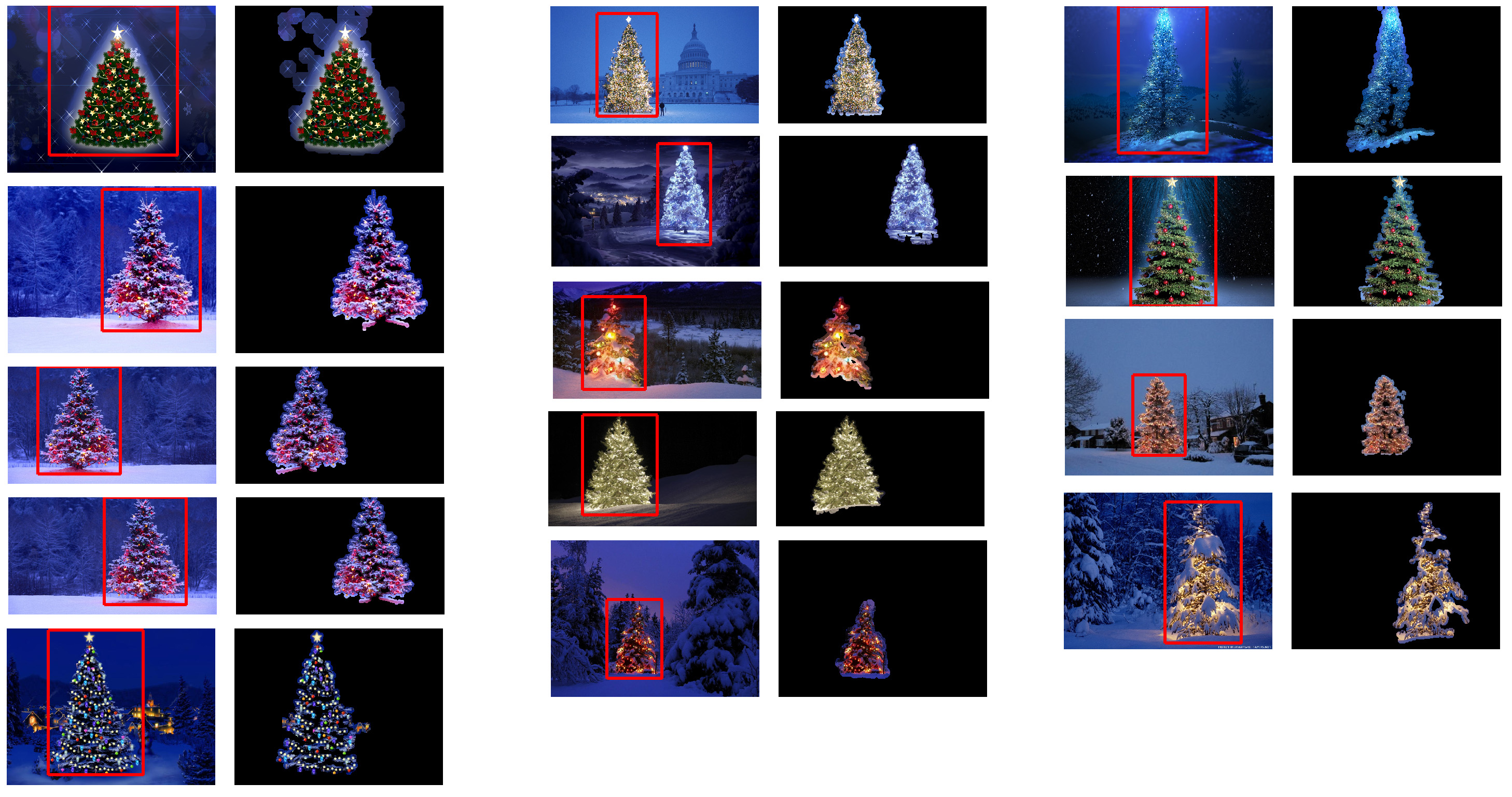
Here some pictures of the final output:










 ` Just change the link to the picture ;)
` Just change the link to the picture ;)











{kind=link}
{kind=link}
{kind=link}